USV formation path-following method based on deep reinforcement learning
Description: Patent No.: ZL202010626769.X US11914376B2 ZL201810298448.4
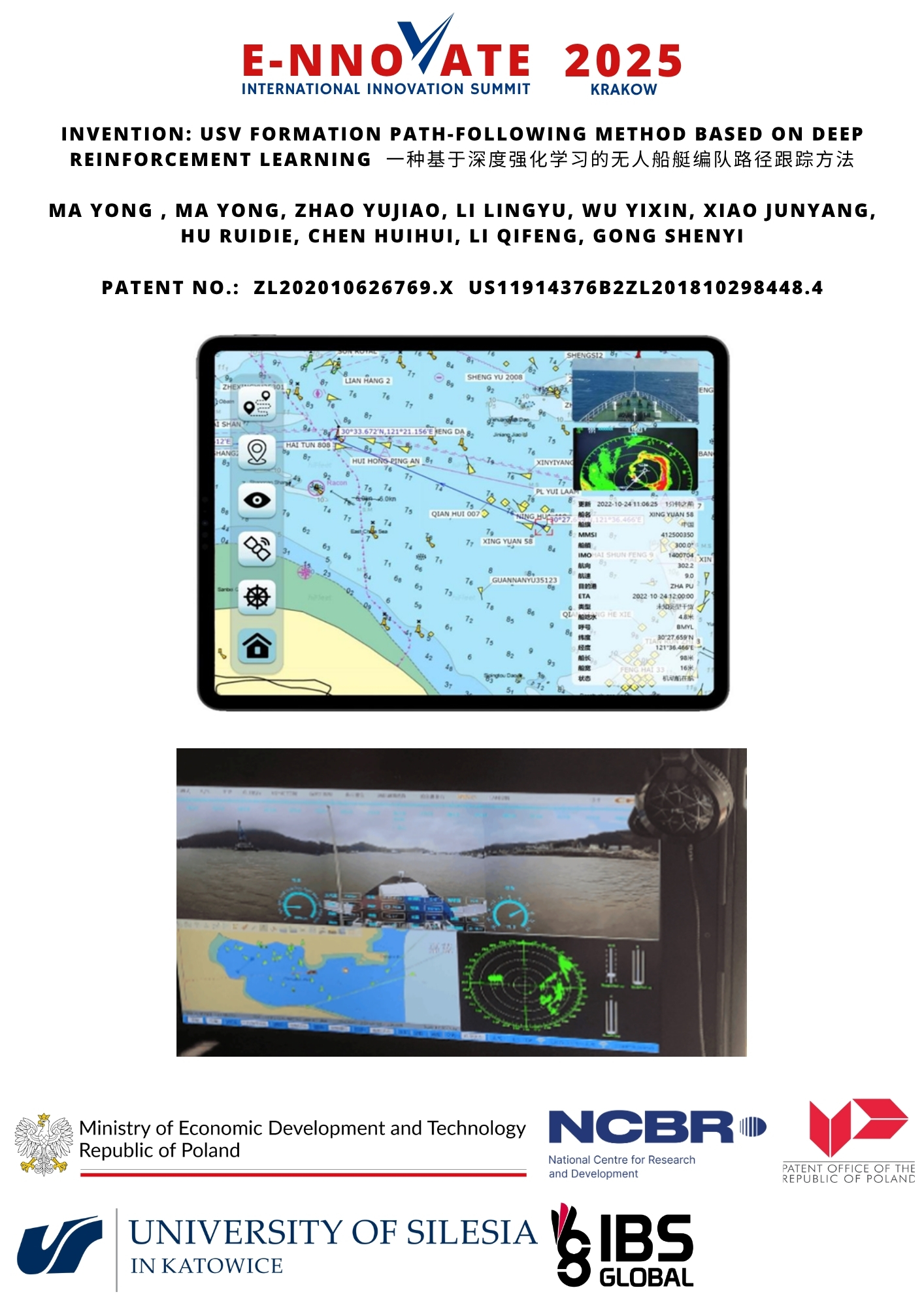
Introduction: This project has invented a deep reinforcement learning-based path tracking method for unmanned surface vessel formations. By innovatively designing a multi-vessel collaborative exploration architecture, dynamic joint reward function, and random noise-driven training strategy, it overcomes the technical bottleneck of traditional methods in coordinately optimizing path tracking accuracy and formation stability in complex water environments. The technology pioneeringly integrates leader-follower models with deep reinforcement learning frameworks, establishing a composite reward model incorporating formation stability errors and path tracking errors. It introduces a virtual leader dynamic projection mechanism and adaptive noise attenuation strategy, significantly enhancing the formation's dynamic adjustment capabilities and system convergence efficiency.The technology has been successfully implemented by multiple enterprises including CETC and Zhejiang Jialan, supporting intelligent upgrades in maritime equipment and generating cumulative sales exceeding 100 million yuan. Recognized with prestigious honors such as the First Prize from China Invention Association, Second Prize from China Association of Oceanic Engineering, and Second Prize from China Institute of Navigation, the innovation substantially improves operational safety and energy efficiency in complex waterway inspection and marine monitoring scenarios. It provides core technical support for China's maritime power strategy while promoting intelligent transformation in the shipping industry and developing new quality productive forces.
Organisation: Wuhan University of Technology
Innovator(s): Ma Yong , Ma Yong, Zhao Yujiao, Li Lingyu, Wu Yixin, Xiao Junyang, Hu Ruidie, Chen Huihui, Li Qifeng, Gong Shenyi
Category: Information Technology, AI and ML
Country: China
